どうも。66thのSoulaです。今日はros2 foxyで、RViz2を用いてRPLIDARのLaserScanを可視化してみました。
まず、RPLIDARのデータをLaserScanタイプのトピックに変換します。変換には、次のリポジトリを使用しました。https://github.com/youtalk/rplidar_ros/
このリポジトリの、Eloquentをチェックアウトし、colconでビルドの後、実行します。
次に、RViz2を起動し、Add->By topicからLaserScanを選択、追加します。トピック名は、デフォルトだと/scanになっています。
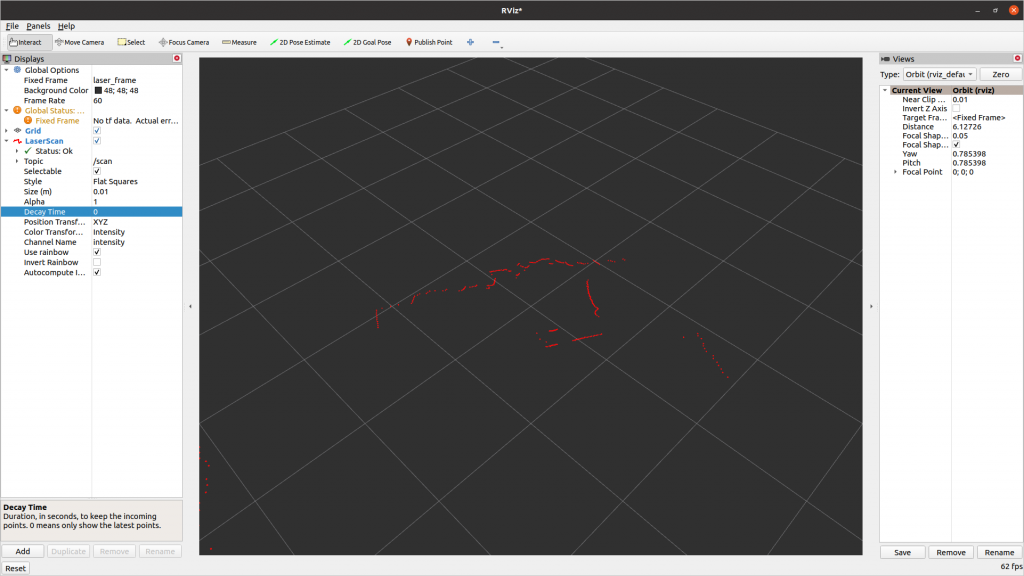
このままだと、エラーが出てしまい、Laserを可視化できませんので、Fixed Frameにlaser_frameを設定します。すると、以下のように可視化することができました!